摘 要:绝缘子是超高压输电线路上的重要装备,由于长期服役于高空、高压恶劣作业环境,以及冬季极端低温环境下会造成的绝缘子串覆冰不仅增大了绝缘子串的重量,而且还会影响绝缘子的电气绝缘性能,特别是绝缘子串上片与片之间所形成的冰凌会直接导致绝缘子片间短路,因此,去除超高压输电线路绝缘子串间的冰凌是保证输电线路正常运行的一项常规作业任务。提出了一种基于激光技术的绝缘子新型除冰机构及除冰方法,设计了激光除冰机器人的基本机械构型,通过无人机的复合,搭载激光装备实现绝缘子串冰凌去除作业,提出了相应的激光除冰作业运动规划,相比传统机械除冰、热融冰等方法,激光除冰作业是一种非接触式的除冰方法,其作业效率高,更适用于远距离除冰,对于超高压多分裂输电线路所处的野外复杂作业环境具有更强的实用性。最后,通过激光装备的 2 自由度偏转角的测试实验和不同作业方式效率及性能对比测试实验,验证了所设计的激光除冰机构能够无盲区地实现绝缘子串除冰作业,同时输电线路激光除冰的可行性最高,激光除冰机器人虚拟样机系统的研究对于绝缘子激光除冰机器人物理样机开发及其实用化研究具有重要理论意义与实际应用价值。
关键词:绝缘子串;激光除冰;机构构型;运动规划;虚拟样机
0 引言
超高压输电线路是电能传输的主要通道,悬垂绝缘子串[1-4]是高压输电线路的重要组成部分,其对于输电线路绝缘和杆塔固定具有重要作用。冬季严寒气候产生的悬垂绝缘子覆冰不仅仅增加了绝缘子串的整体重量,同时还会影响绝缘子的电气性能,严重的绝缘子覆冰会导致输电线舞动、断线,甚至杆塔倒塌、绝缘子闪络等线路事故的发生,这些都威胁到输电线路的正常稳定运行。因此,对高压输电线路悬垂绝缘子覆冰清除是电力部门一项常规且极其艰巨的作业任务。目前,国内外相关机构已经研制了一些输电线路及绝缘子串的除冰装置,但主要还是依赖于人工登塔作业,如山东电科院、武汉大学、湖南大学等科研机构分别研究了输电线上的除冰方法,开发了相应的智能化除冰装备,通过对输电线路除冰机理的研究,可以为绝缘子覆冰清除装备的研制提供一些理论支撑与技术参考。
综合国内外的研究现状,在常见的输电线路除冰方法研究方面有机械方式除冰[5-6],其主要是通过人工登塔或者自动化装备搭载除冰机械装置,通过敲打、碰撞等近距离接触方式进行除冰作业,除冰效果有限。此外,机械除冰过程中产生的振动与冲击对输电线路和绝缘子可能会存在一定损伤和安全性隐患,对除冰工具搭载平台的稳定性控制要求较高。目前另一种主流的除冰方法是利用热融冰[7-8],如通过接近冰层,通过燃烧汽油产生热量融化冰层。上述两种除冰方法的共性是近距离接触式除冰[9-10],且机械和火烧都可能会损伤到输电线路,因此,如何在保证除冰效果的前提下,保证输电线路不受除冰损伤是输电线路除冰的关键。激光作为一种清洁能源,它不仅可以实现远距离非接触式的除冰[11-12],而且在除冰作业过程中对输电线路无任何损伤,是解决机械式除冰和热熔冰作业缺陷的一种行之有效的方法。利用激光进行输电线路除冰的主要优势在于激光高功率密度、远距离非接触式除冰,安全性高,且可以实现输电线路的带电作业除冰,无需断电。同时,相对于地面设备而言,无人机具备飞控灵活、安全性高、可操作性强的特点,因此,利用无人机搭载激光除冰设备,其作业空间更为广阔,人机协同操控更加方便,作业效率更高效,且能够有效避免作业盲区。
基于上述研究背景,提出了一种基于无人机搭载的超高压悬垂绝缘子激光除冰机器人机构构型,开发了其虚拟样机模型,在此基础上提出了输电线路绝缘子串的激光除冰作业方法,通过人– 机协同运动控制,及激光器的旋转和俯仰运动可以实现无接触式带电悬垂绝缘子除冰作业。
1 超高压悬垂绝缘子串除冰作业任务分析与除冰机器人构型设计
1.1 悬垂绝缘子串除冰作业任务分析
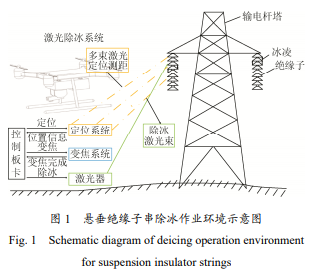
悬垂绝缘子串及其所在的超高压输电线路典型结构如图 1 所示,主要包括输电导线、地线及其金具、直线杆塔、耐张杆塔及其地基,绝缘子串悬挂在直线杆塔的横担上,下端通过与悬垂线夹的联接固定于输电导线之上。
绝缘子的主要功能是支持和固定载流导体,在载流导体与地之间形成良好的绝缘。绝缘子不仅承受机械负荷、导线和金属附件的重量,还必须承受恶劣天气情况下的风载荷、雪载荷、导线舞动以及运输安装过程中所引起的冲击负荷。从电气角度来说,绝缘子不仅要使导线与地绝缘,还必须承受雷电和开关操作引起的过电压冲击,绝缘子上的覆冰和冰凌会增加杆塔负重,绝缘子串片间冰凌是导致片间短路和影响绝缘子电气性能的主要因素。由于绝缘子片间的冰凌呈直线状和柱状,因此,完成作业任务的关键是激光装置对于理想状态为直线状的冰凌的识别与定位,以及激光作用于冰凌上的融冰机理研究。
1.2 激光除冰机器人机构构型设计及其作业空间分析
本文设计的基于无人机搭载的超高压绝缘子激光除冰结构如图 2(a)所示,该激光除冰装置包括无人机和激光系统,其复合后如图 2(b)所示。激光除冰装备包括机械部分和电气两大部分,机械部分包括旋转和俯仰两个自由度可以对激光头方位和位姿进行在线实时调整,使得激光头可在一定旋转角度和俯仰角度内调整至合适工作位姿,最大角度视实际设计情况及工作需要而定。电气部分主要包括激光玻璃管、电源、电池、控制器、电压转换模块、无线通讯模块、扩束镜头等。其中,核心激光部件主要包括激光器探头、频率转换装置、准直镜、扫描振镜、聚焦镜等,瞄准装置可通过电子望远镜将图像信息传送给激光控制系统,并在显示屏上显示。同时,考虑无人机飞行平衡及稳定性,将激光装置的机箱设计为梯形结构,将质量较轻的控制模块和无线通讯模块置于前端,并使机箱前端部分留有激光发生的装置旋转空间,梯形结构的设计也使得机箱整体高度得到了有效控制。
要保证激光除冰机器人无盲区地实现绝缘子串除冰作业,2 自由度的激光除冰装备的可达运动空间分析是关键问题之一,该可达作业空间和俯仰运动、旋转运动两自由度有关。假设激光头的俯仰运动俯仰角为 α,旋转运动偏转角为 β,则激光头在忽略外界干扰情况下的可达作业空间 P 可以用式(1)来表示,激光除冰机器人通过 2 自由度来调节激光器的可达作业空间示意图如图3所示。
2 激光除冰机器人控制系统与作业运动规划
2.1 激光控制系统的硬件
组成激光控制系统是机器人激光除冰作业的核心,激光器能够稳定可靠地发出激光是完成作业的关键。本文设计的激光控制系统采用 STM32 单 片机为核心控制器,激光控制系统的硬件组成如图 4 所示,其中核心 CPU 采用 STM32F107VCT6 芯片,在其外围具有时钟电路、晶振电路、复位电路和电源电路等基本单元,激光控制模块主要包括功率设定、激光调制、MO 开关、急停和同步脉冲等功能。激光运动模块能够控制激光器的俯仰和旋转运动;激光功能控制模块能够实现激光自主聚焦和对象自主定位;激光通讯模块能够实现地面控制端与无人机–激光装备的远程无线通信。通过各部分电路的协调工作产生可控稳定和功率可调的激光源,用于输电线路绝缘子除冰作业。
2.2 激光除冰机器人作业运动规划
合理的运动规划是高效完成绝缘子激光除冰作业的关键,基于无人机搭载的超高压绝缘子激光除冰机器人的作业运动规划步骤如下:
(1)通过地面控制器,控制无人机启动飞行至待除冰超高压绝缘子串一侧,调整合适的飞行高度,且与待除冰的超高压绝缘子串保持合适距离,高清瞄准装置拍摄图像信息传给地面控制器;
(2)根据拍摄图像信息,地面控制器控制无人机飞行高度与激光除冰装置的旋转和俯仰关节,调整合适角度使激光头瞄准至待除冰的绝缘子冰凌上;
(3)根据视频图像信息,控制系统计算出无人机作业距离,选择合适的激光功率以及输出模式,机器人规划激光除冰作业扫描路径;
(4)根据机器人规划的作业路径,无人机搭载的激光除冰装置调整旋转和俯仰关节角度进行除冰作业,直至除冰作业完成,然后,进入下一个工作状态。若绝缘子串上出现冰凌时,首先对冰凌进行激光清洗处理,若绝缘子串覆冰厚度较厚时,控制激光头对覆冰反复进行左右扫描处理,必要时进行上下扫描融冰。当一侧绝缘子串覆冰清除完成后,飞行至另一侧进行除冰作业。通过无人机和激光除冰装备的协同运动控制,并重复上述过程实现杆塔上整串绝缘子激光除冰作业。
超高压输电线路悬垂绝缘子除冰作业任务如图 5 所示,为使无人机–激光装置系统能够准确地判定是否完成一次完整作业,在激光除冰作业前,利用无人机搭载三维成像扫描仪对整个超高压输电线路,特别是杆塔处的悬垂绝缘子串进行三维成像和扫描,获取作业环境和主要作业对象的点云数据,利用专业三维重构软件对作业现场进行三维重构,获取绝缘子串的片数、高度、内径、冰层等重要参数。基于上述参数对无人机–激光装置系统实施协同控制实现无盲区的绝缘子串精准除冰作业。
3 激光除冰热传导模型和作业机理
3.1 激光除冰热传导数学模型
当激光束照射绝缘子盘面覆冰时,会发生显著的热效应,不同激光器的波长对于冰层融化效果不一样,同时融冰效果还与覆冰厚度成正比关系,因此,对于相同波长激光束照射在不同冰层上,其融冰效果也是不同的。当用较长波长激光照射并扫描绝缘子覆冰时,大部分激光能量都会被覆冰表面所吸收,此时,绝缘子表面温度显著升高,冰融化为水甚至直接气化。当用较短波长激光照射绝缘子覆冰时,除了表面覆冰吸收激光能量外,冰层内部也可吸收激光能量,因此,覆冰内外冰层形成温差,在内外温差应力超过冰层最大抗压时,绝缘子覆冰会发生断裂或者自动脱落,这种方式下的激光除冰效率更高。不论是绝缘子冰层表面融化,还是内外温差过大产生应力造成的冰块自动炸裂和脱落,其除冰机理都是基于激光热传导模型和能量守恒定律,激光热传导方程可用于绝缘子覆冰周围及内部的温度场分析,
3.2 悬垂绝缘子激光除冰作业机理分析
求解式(2)(3)(4)可以得到激光作用于冰面所产生的温度场分布特性,对于固定的冰面材质,激光绝缘子除冰作业时,激光波长大小以及作业方式的合适选择,可使激光能量可以最大限度被覆冰吸收用于除冰,这是提高激光除冰作业效率的关键。根据作业前的准备,通过无人机搭载三维成像扫描仪对悬垂绝缘子串的扫描,获取除冰对象的点云数据,通过软件的重构和视觉算法可以实时地获取冰面尺寸及厚度等几何特性,根据这些几何特性来对激光器的波长大小、功率大小、扫射时间等关键控制参数进行合理设置与调配,通过除冰对象三维重构所得几何数据与激光器的控制参数之间的耦合模型来实现绝缘子串的最优激光除冰作业。
4 测试实验
4.1 可达作业空间测试实验与分析
为进一步验证激光除冰机器人机构构型在绝缘子覆冰清除作业中的可行性和有效性,通过调节激光装备上的两个运动自由度的偏转角 α,β 来测试激光束在绝缘子串上扫描的作业空间范围,以本文作业运动规划中垂直形态下的 5 片悬垂绝缘子构成的 1 个绝缘子串来进行激光扫描作业运动空间范围测试,规定俯仰运动向上俯仰角 α 为正,左右运动向左偏转,偏转角 β 为正,初始位置的两个偏转角都为 0,且激光头正对绝缘子串第 3 片中心位置,得到的测试结果如表 1 所示。
通过表 1 的测试结果可知,在激光装备构型设计时,2 自由度的激光运动关节控制系统其偏转角分别在 45°~−45°之间和 60°~−60°之间,激光器在运动过程中不会与激光装备自身及搭载设备无人机之间发生运动干涉,且通过偏转角的调节可以实现一串绝缘子的上下扫描和一片绝缘子的左右扫描,因此,机械设计上通过设置该偏转角及其运动控制,激光除冰机器人能够实现超高压输电线路悬垂绝缘子的无盲区除冰作业。
4.2 作业性能测试实验与分析
在湖南省电力有限公司输电检修分公司带电作业中心所辖的望新培训线路Ⅰ线#10 号塔 B 相上进行模拟除冰试验,ZB1-24 型杆塔,LGJ-400/50 型导线,XP-7 型绝缘子串,总共 10 片绝缘子。为进行除冰效果对比,分别进行两次除冰实验,第一次通过机械式敲打除冰,整串绝缘子的覆冰清除大约需要 10 min,第二次利用激光与机械除冰相结合的方式,初始阶段利用机械力敲打覆冰,然后用激光远程照射绝缘子覆冰,由于激光在冰面的热效应,绝缘子串覆冰出现一些裂纹,再用机械力轻击覆冰,冰层会自动脱落,完成一整串绝缘子覆冰清除大约为 6 min。由于结合了激光除冰,整体作业效率有了明显提高,若该作业方式推广至整个片区的超高压输电线路绝缘子除冰作业其效率提高所产生的经济效益是可观的。上述实验结果也表明,机械除冰方法在结合激光除冰后,由于激光作用冰层上的热融效应和热应力效应,除冰效率会提高,这是其相比接触式除冰的重要优势。同时通过实验可得到不同除冰方法的特点及其性能评价,如表 2 所示。
通过表 2 的对比也可以看出激光除冰综合了机械式除冰和热融冰各种的优点,是目前操作性、安全性和效率最高的一种除冰方式。
5 结论
(1)提出了一种基于无人机搭载的输电线路绝缘子激光除冰机器人基本构型、虚拟样机系统及其与无人机的复合协同运动作业控制方法。
(2)提出了激光除冰的面热源和体热源作用下的激光能量热传导方程,并分别计算了激光作用下的冰层温度场的具体表达式和融冰模型。
(3)提出了一种激光除冰机器人的嵌入式集成控制体系架构及其物理实现方法,并通过相关测试实验验证了除冰机器人机构构型及激光除冰的可行性和有效性。——论文作者:邝江华 1,2,邹德华 1,2,江 维 3 ,刘兰兰 1,2,彭沙沙 1,2
参考文献:
[1] SHRUTHI C M, SUDHERR A P, JOY M L. Optimal crossing and control of mobile dual-arm robot through tension towers by using fuzzy and Newton barrier method[J]. Journal of the Brazilian Society of Mechanical and Engineering, 2019, 41(6): 245-270.
[2] SEOKK H, KIM Y S. A state of the art of power transmission line maintenance robots[J]. Journal of Electrical Engineering & Technology, 2016, 11(5): 1412-1422.
[3] YUE X, WANG H G, JIANG Y. Design of a novel locomotion mechanism of power transmission line inspection robot[J]. Applied Mechanics and Materials, 2017, 863: 201-207.
[4] WANG YUE X, JIANG Y H. A novel 110 kV power line inspection robot and its climbing ability analysis[J]. International Journal of Advanced Robotic Systems, 2017, 14(3): 1-10.
[5] ZHOU F, ZHU J, AN N, et al. The anti-icing and deicing robot system for electricity transmission line based on external excitation resonant[J]. IEEE Transactions on Electrical and Electronic Engineering, 2020, 15(4), 593-600.
[6] 付子峰, 吴启进, 刘继承, 等. 人工智能除冰技术在输电线路中的应用[J]. 湖北电力, 2018, 42(3): 15-18. FU ZIFENG, WU QIJIN, LIU JICHENG, et al. Application of artificial intelligence deicing technology in transmission lines[J]. Hubei Electric Power, 2018, 42(3): 15-18(in Chinese).
[7] ANTONINI C, INNICENTI M, HORN T, et al. Understanding the effect of super-hydrophobic coatings on energy reduction in anti-icing systems[J]. Cold Regions Science and Technology, 2011(67): 58-67.
[8] FARHADI S, FARZANEH M, KULINICH S A. Anti-icing performance of super-hydrophobic surfaces[J]. Applied Surface Science, 2011, 257(14): 6264-6269.
[9] KULINICH S A, FARZANECH M. On ice-releasing properties of rough hydrophobic coatings[J]. Cold Regions Science and Technology, 2011, 65 (1): 60-64.
转载请注明来自:http://www.lunwencheng.com/lunwen/dzi/21756.html
