摘 要:为提高船舶电力系统的用电稳定性,保证船舶在空载、加载、短路等诸多工况下功率分配的合理性,采用模块化的思想,对船舶原动机及调速系统、励磁调压系统、同步发电机及发电机并车模型进行详细建模。模拟仿真单台发电机和多台发电机并车运行下空载运行、突加负载运行、突加异步电机等几种典型工况,观察同步发电机转速及端电压变化,电网电压变化,异步电动机电流及电压变化情况,避免在实船上进行典型工况故障分析和实船实验测试产生的高昂成本,仿真结果的数据对船舶电力系统的设计与研究具有积极意义。
关键词:船舶电力系统 Matlab/Simulink 励磁调压
0 引言
船舶电力系统由发电系统、配电系统、电网及负载组成,实际船舶电力系统测试过程中,因其实船测试会产生高昂的测试费用以及现场试验安全可靠性难以评估,因此有必要对船舶整个电力系统模拟仿真,模拟船舶电力系统中突加负载、突加异步电机、同步发电机并车发电机组电压、电流变化情况等几种典型工况,建立励磁调压系统模型、原动机及调速系统模型、并车仿真模型,同步发电机模型、异步电动机模型,最终将各部分模型按照实船电力系统搭建起整体仿真模型,完成对船舶电力系统的研究。
1 船舶电力系统仿真模型建立
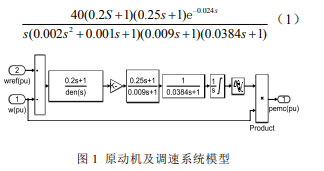
1.1 原动机及调速系统模型
通过二阶模型对船舶柴油机及其调速系统进行组合建模。将实际转速与设定转速作差后送入主控制单元,主控制单元与放大单元结合在一起,构成比例微分加二阶惯性的控制单元。柴油机的输出转速经积分作用变为转矩,最后将该转矩与转速相乘得到功率信号。其传递函数如公式(1),在 Matlab/Simulink 仿真环境中建立仿真模型如图 1 所示。
1.3 并车控制模型
船舶电力系统并网时,为减少冲击电流对电网的影响,保证发电机组的正常运行,采用准同步并车方式,此方式必须保证与待并电网相序一致,待并发电机与运行发电机频率、相角、相位均相同,同步并车模块仿真模型包括压差检测模块、频差检测模块、压差检测模块。
1) 压差检测和控制模块
通过比较在网发电机电压与待并发电机电压的差值,判断其绝对值是否小于设定值,当误差范围小于 40 V 时,输出脉冲信号 1,反之不产生并车信号。
2) 频差检测和控制模块该模块
首先将正弦波转换为方波信号,通过求解方波的周期,进而得到方波的频率,最终将在网发电机的频率和待并发电机的频率做差值,对差值取绝对值。当误差小于 0.5 Hz 时,产生并车信号;误差大于 0.5 Hz 时,并车信号为 0。
3) 相差检测和控制模块
相差检测和控制模块,通过时间设置进行发电机并车时间设定。
最后将压差、相差、频差三部分检测和控制模块封装成同步发电机并车模型,当三部分通过逻辑判断发出信号 1 时,断路器接收到触发脉冲信号,完成同步发电机并车操作。
2 电力系统典型运行工况仿真
2.1 单机突加静态负载仿真
对柴油发电机突加静态负载进行仿真验证。开始时单台发电机组空载运行,随后分三次依次加 1/3 额定功率的静态负载,直到满负荷稳定运行,完成仿真。观察柴油发电机组各个参数变化以及电网电压、电流的变化情况,并与实船的柴油发电机组台架试验的结果进行比较。建立单机运行工况下投切静态负载仿真模型。
0 s 时主开关 Switchl 闭合,发电机空载稳定运行;2 s 时断路器 Break1 闭合,L1 接入电路; 8 s 时断路器 Break2 闭合,L2 接入电路;14 s 时 Break3 闭合,L3 接入电路,仿真时间设置为 20 s。经过仿真,发电机组各个参数变化曲线如图 2 所示。
相关期刊推荐:《电力系统保护与控制》(半月刊)创刊于1973年,是由国家电网中电装备许继集团有限公司主管、国家电网中电装备许昌智能电网装备试验研究院(原许昌继电器研究所)主办的全国性电工技术类科技期刊。设有:继电保护、电力系统分析与控制、电网规划设计与可靠性、电力市场、电能质量等栏目。
如图 3 所示,加负载时,A 相电流及电压变化;第 2 s 时突加 1/3 负载,电网电流增加;第 8 s 时突加 1/3 负载,电网电流继续增加;第 14 s 时突加 1/3 负载电网电流继续增加,最终电网电流趋于稳定。
2.2 单机突加异步电动机仿真
异步电机的投切严重影响船舶电力系统的稳定性,研究异步电机投入电网和切除电网时,发电机端电压、转速、励磁电压等的状态,并进一步通过仿真结果确定异步电机的物理特性。投入异步电机之前,发电机带负载运行,6 s 时闭合开关。加入异步电机负载后,转速下降,下降到 0.998 pu。为使电网电压稳定,励磁电压增大后恢复稳定,发电机端电压和轴功率增大,10 s 时卸掉异步电机负载时,电机状态与加入异步电机时状态相反。
3 单机短路故障仿真
船舶电网中,发生三相短路故障时对电网的破坏尤为严重,图 5 所示,10 s 时发生三相短路故障,发电机轴功率激增,由 0.32 pu 激增到 1 pu,并在故障产生过程中震荡。此时,励磁调压系统急剧增大,发电机端电压极速下降,由 1 pu 下降到 0.1 pu,电机转速由 1 pu 下降到 0.5 pu 左右。
4 发电机组并车模型仿真
实际船舶电力系统中,存在多机运行的情况,多台发电机运作时,涉及到同步发电机组的并车和解列问题。在进行实际同步发电机组并车运行时,模拟仿真观察电网并车过程中电网电压、电流,同步发电机的各项参数是必要的,建立同步发电机仿真模型。
同步发电机组并车运行时,两台发电机端电压不同时,进行仿真。如图 6 所示,两台发电机输出电压相差几乎为零,此时并车操作较为安全,电网冲击电流不大。发电机并网运行时,初始电流波动较为明显,在第 8 秒时,电网冲击电流很小,实现两台发电机组的并车运行。——论文作者:周瑞平,李 键
参考文献:
[1] 郑恒持, 王孙清, 招聪, 张炜. 基于Matlab/Simulink 船舶电力系统建模与仿真[J]. 船电技术, 2019, 39(7): 20-24.
[2] 侯林其, 船舶电力系统建模与仿真研究[D]. 大连:大连海事大学, 2016.
[3] 朱志宇, 刘维亭. 船舶电力系统的数学建模和鲁棒控制器设计 [J]. 电机与控制学报 , 2007, 11(3): 290-297.
[4] 刘其辉, 贺益康, 张建华. 交流励磁变速恒频风力发电机的运行控制及建模仿真[J]. 中国电机工程学报, 2006, 26(5): 43-50.
[5] 薛士龙. 船舶电力系统及其自动控制[J]. 北京: 电子工业出版社,
[6] 申喜, 唐颖, 魏文轩等. 基于Siraulink的船舶电力系统的仿真[J]. 舰船电子工程, 2013, 33(9): 91-9
转载请注明来自:http://www.lunwencheng.com/lunwen/dzi/21193.html
