摘要:为满足电力线路应急处置和安全巡检业务的高效、自动化处理需求,设计研发了一套无人直升机多传感器电力线路安全巡检系统。首先,通过高精度同步授时与标定,统一机载紫外、红外、可见光以及激光传感器的时间、空间基准。其次,无人机通过机载多传感器同步采集输电线路的高精度3维激光点云、高分辨率航空影像、红外视频、紫外视频,进行多源数据的独立与融合处理,完成对线路通道的安全距离检测、线路设备异常发热及异常放电检测,实现对输电线路不同缺陷和隐患的智能诊断。最后输出标准诊断报表,以供现场勘察确认。为验证无人机多传感器巡检系统的功能,开展了实际带电运行线路巡检试验。巡检结果表明,无人机巡检系统对线路缺陷与隐患的检测结果与人工现场勘察结果一致。该系统能发现输电线路多种运行缺陷和安全隐患,为运行单位提供相应的检修维护决策依据,还能提供缺陷或隐患位置的可视化场景信息,方便人工辅助诊断和排查,提高输电线路巡检效率。
关键词:无入直升机;输电线路;安全巡检:多传感器;智能诊断;多源数据
0 引言
电力系统架空输电线路规模大,所处自然环境复杂恶劣,这对输电线路的稳定运行带来不利影响,需要通过定期巡视和维护预防事故的发生。传统的输电线路巡检多采用人工方式,巡线作业强度大、周期长,对于一些地形复杂甚至危险的地区,难以开展巡线工作。相较于传统的人工巡检方式,目前通用的航空摄影测量技术虽然在一定程度上降低了人员的野外劳动强度,缩短了工期,但是在植被覆盖地区的断面量测精度较低¨之J。
近年来,随着传感器和遥感技术的不断进步,利用无入直升机多传感器获取多源数据已经成为可能,为解决上述问题提供了新思路和有利条件。利用机载传感器系统进行电力巡线是近年来国内外应用较为广泛的一项高新技术,采用该技术,可以在不停电的情况下,经过飞行直接获取电力线走廊内的高分辨率影像和精确的空间3维信息,利用这种方法,可以大幅度提高巡线工作的效率,减少大量野外作业量,降低巡线成本。巡检获取的数据不仅可为输电线路台帐数据提供参考,也可通过专业分析处理(如高程分析,3维可视化管理等)为电网管理和维护提供多源数据支持【jJ。葡萄牙的Power line maintenance inspection(PLMI)系统、美国的 Transmission Inspection and Maintenance Sys— tem(TIMS)系统以及德国的Integrated helicopter Corridor Mapping(IHCM)等都是基于遥感技术的电力巡线系统i4‘6J。我国云南电网、华北电网等的相关部门也对直升机巡线进行了研究和应用l/‘1…。但是当前有入直升机巡线空间定位的量测精度不高,且获取的多源数据大多分开处理,没有集成为一个整体,处理起来也比较麻烦【l¨。
本文针对我国高压、特高压电力线路日常安全维护和应急处置等业务的需求,开展复杂地形条件下长距离、超视距无人直升机电力线路安全巡检和智能诊断系统关键技术研究【l 2。DJ,研制了基于无人直升机(unmanned aerial vechicle,UAV)多传感器集成的电力线路安全巡检软、硬件系统,完成了无人机巡检系统性能测试和实际线路适应性巡检试验,实现了省级电网的示范应用,对推动我国无人机软硬件研发能力提升,促进我国电网安全、高效、智能巡检和应急保障技术发展进步具有参考意义。
1 系统设计
1.1多源数据采集系统
无人机中、低空数据采集技术作为空间数据获取的一项重要手段,具有续航时问长、飞行成本低、数据分辨率高、调度机动灵活等优点,可实现数据实时传输,并可进入高危地区探测,是卫星遥感与传统航空摄影测量的有力补充,国外已形成与卫星遥感和普通航空遥感并行蓬勃发展的局面。尤其是在重大自然灾害应急响应、阴云天气低空光学影像获取、局部地区及时遥感、低空大比例尺高精度测绘及分布式日常低空遥感监测等情况下,无人机航空遥感系统拥有卫星遥感和普通航空遥感不可取代的作用。将无人机应用于电力线巡线以及电力设施的安全状态评价,可充分利用其在成本、时效性等各方面的优越性,很好地解决目前使用人工方式存在的种种问题。
本文使用的无人机多传感器数据采集系统可以获取电力线路走廊海量高精度机载激光扫描 (1ight detection and ranging,LiDAR)点云数据、高分辨率航空数码影像、热红外影像以及紫外影像等。该数据采集系统主要由以下几个部分组成:激光器、可见光检测仪、红外热成像仪、紫外摄像仪、接收器、全球定位系统(global positioning system,GPS)、惯性测量单元(inertial measurement unit,IMU)组成的定位、定姿系统(position and orientation system, POS)、飞行计划和管理系统以及数据存储系统等,其整体架构如图l所示。
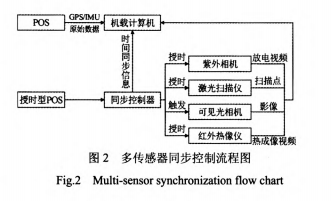
传统直升机巡线时多采用红外热像仪、可见光相机等传感器,通过人工操作进行数据采集,获取的数据相对独立,且各数据帧没有明确的位置信息,各传感器数据之间无关联,难以实现统一的数据管理与多源数据对比分析等应用。无人直升机平台上搭载的各型传感器数据的采样频率、时间参考基准与时间精度各不相同,并且各传感器所采集的原始数据处于不同坐标参考系下,输出数据难以在同一个时间、空间基准上进行管理。将各个传感器所采集的数据进行融合诊断处理分析,需要解决时间基准和空间基准的问题。本文提出一种使用GPS时间作为时间基准,通过同步授时的方法统一各传感器时空基准,实现POS数据、影像与红外、紫外视频流数据、点云数据等多类型数据的同步获取,统一各传感器的时间、空间基准,具体同步流程见图2。
多传感器采集的多源数据的空间基准来自姿态传感器——POS系统。本文设计将激光、红外、紫外传感器与POS系统进行关联,通过机载传感器统一时间坐标的建立,实现各传感器采集的数据的时间、空间基准的统一。由于使用计算机高级语言编写程序不能高精度记录“s或ns级时间,本文设计通过授时型GPS和时间同步控制器实现各传感器数据的同步记录,在高精度确定时间基准的同时完成同步数据采集,减轻了机载工控计算机的任务负荷,保证了系统的鲁棒性。具体实现如下:首先将GPS输出的时间信号和秒脉冲(pulse per second, PPS)信号引入至时间同步控制器,对时间同步控制器进行对时。同步控制器先给激光扫描仪、红外热像仪、紫外相机、可见光相机授时,各传感器在接收到PPS信号后,将秒计数清零,从而获得精确至 us的时间。同步控制器同时用于触发相机曝光,并将曝光时刻发送至计算机记录下来。通过以上步骤,实现了POS、可见光相机、激光扫描仪、红外热像仪、紫外相机数据的时间都为统一的GPS时间,达到多数据源时间基准统一的目的。时间基准统一后,在POS高频(100~200 Hz)记录的原始数据中即可获取到各传感器每l帧数据采集时刻所对应的空间位置和姿态数据,完成空间基准的统一。
不同于传统的多传感器独立控制的数据采集方法,通过本文设计提出的多传感器同步控制方法, 可以实现多传感器数据采集的时间与空间基准统一,采集到的激光点云数据、光学影像数据、红外视频数据和紫外影像数据各数据帧为同步观测数据,为多源数据对比分析实现故障的诊断打下数据基础。
1.2安全巡检及智能诊断
电力线路走廊安全巡检智能诊断系统以无人直升机多传感器同步获取的高精度3维激光点云、高分辨率航空影像、红外视频及影像、紫外视频及影像为基础数据源,进行多数据源独立和融合处理,实现稳健的电力设施的安全状况检测,及时高效地发现缺陷隐患。诊断体系划分为基于LiDAR的电力线路信息提取及安全诊断、可见光影像电力线路信息提取及安全诊断、红外影像电力线路信息提取及安全诊断、紫外视频电力线路信息提取及安全诊断4部分。各部分的主要作用如图3所示。
1.2.1 基于激光扫描技术的电力线路安全诊断
机载激光扫描技术作为近年来快速发展起来的一项新技术,可以弥补人工巡检及传统航空摄影测量无法进行电力线测量的缺憾,能够快速获取高精度的数据信息,提高电力巡线效率,减少成本投入【2J。因此研究机载激光扫描数据中的电力线路信息提取及安全诊断对电力巡线工作有着非常重要的现实意义。
从大量无序的激光点云数据中提取电力线矢量数据用于线路安全距离检测是3维激光扫描用于电力巡线的关键技术。基于激光扫描技术的电力线路安全诊断主要完成电力线激光点云的自动提取,生成精准的电力线矢量模型进行安全距离诊断,对超限地物进行安全预警。本文设计使用基于投影的电力线提取方法对激光点云数据中的电力线点云进行提取与拟合。其具体提取方法如下:
1)首先对原始激光点云数据(见图4(a))进行多实体分类【l6|,获得地表植被及建筑物点云(见图 4(b)),获得电力设备激光点云数据(见图4(c)),在此点云基础上进行电力线点云提取。悬挂输电线符合悬链线方程描述的弧状,在铅垂方向上有高程差异,水平面内的投影呈直线分布,且各相各股电力线具有互相平行的特性。本文采用2维Hough变换的方法自电力线路点云中计算出线路的水平投影方程。对保留下来的输电线路激光点云的苁】,坐标在XOY投影面内进行2维Hough变换,检测直线分布点云,获得直线方程。统计这些直线方程获得输电线的主方向,与主方向夹角较大的直线认为是噪声直线,将其滤除。
2)输电线路点云在水平投影面内呈离散点状态,均匀分布在线路几何中心两侧,各条输电线之间具有一定的间距,Hough变换后,检测结果为多簇斜率近似、截距集中分布在某几个区间的多条直线。为获取单条线路的精确直线方程,采用最小二乘拟合的方法进行中心线拟合,从而获取输电线路在水平投影面内的中心线直线方程【jJ。
3)依据检测到的直线方程反求出每条输电线上的激光点。在水平投影面内,计算每个激光点到最小二乘拟合的输电线中心线之间的距离,若激光点到拟合直线之间的距离小于一定的阈值,则认为该激光点属于此输电线类别。如此循环至没有点满足该条件,即获得每条输电线上的激光点,完成电力线点云的提取(见图4(d))。使用电力线点云提取结果结合滤波获得的地物点云数据,即可进行输电线路安全距离诊断。
1.2.2基于可见光及红外、紫外的线路安全诊断
早期直升机巡线系统多采用红外成像仪、可见光录像机、高分辨率望远镜、数码摄像机、紫外摄像仪等设备,在这方面已经进行了较多的研究,技术以及作业流程相对成剥11,18-191。但目前相关研究主要集中于手持设备采集数据,背景多数为简单天空背景。对于复杂背景下的可见光、红外、紫外数据的自动诊断方法少有研究。为保证电网运行安全,无人机巡检作业多在线路走廊的斜上方450左右进行(如图5所示),采集到的数据包含地面部分,诊断方法受地表物体干扰,背景复杂,现有有人直升机或手持设备数据后处理算法难以直接适用。
基于本文设计的多传感器巡检吊舱同步采集的多源数据,针对无人机巡检复杂背景这一特性,对采集到的红外、紫外、可见光数据的诊断方法展开了一系列的研究。对于红外热成像视频数据,提出了一种基于运动估计的帧间差分方法,消除背景热源对设备热点的干扰,实现在无人机复杂背景下的电力设备热点自动检测¨2。。对于紫外放电视频数据,提出了一种基于光斑聚类方法的高放电概率区域自动提取方法,实现设备异常放电点检测【l川。对于可见光影像数据,提出了基于方向梯度直方图 (histogram oforiented gradient,Hoo)算子的复杂背景下可见光影像中绝缘子自动定位方法,实现绝缘子自动提取定位,以供绝缘子自爆或破损等故障缺陷的分析【1w。
同步控制采集获得的多源数据有着统一的时间、空间基准,利用POS系统提供的位置信息,可准确对诊断获得的故障进行定位,对人工现场实地确认有实际意义。
2应用及分析
为验证本文研发的基于无人机多传感器的电力线路安全巡检系统及智能专家诊断系统功能,在佛山220 kV丹镭甲乙线以及广东某220 kV线路进行了实际线路现场巡检试验,对实际巡检采集的激光点云、可见光、红外、紫外等多源数据进行处理、分析和诊断测试。现场试验及诊断结果见图6_图12。
采用无人机巡检智能诊断系统进行巡线数据显示,在界面上同步展示包括可见光影像、紫外视频、红外视频以及激光点云在内的多源数据。系统使用红外、紫外、可见光等波段的数据以及线路走廊自身的3维位置信息作为多源数据输入,并据此信息进行线路安全诊断。
系统使用激光点云数据提供的3维位置信息,对电力线设备进行3维重建,获取设备精细3维模型。对于线路环境采用无人机机载设备采集精细地形叠加基础地理信息数据的方式进行重建。将电力设备与走廊环境进行叠加3维显示,完成整个线路环境的3维重建,如图6所示。
图7为基于提取的电力线矢量进行安全距离检查的结果图。通过计算电力线与邻近地物之间的距离并将其与安全阈值进行对比,对超限区域进行预警。经现场勘查,超限地物为超安全高度树木。
图8为使用基于HOG算子的复杂背景下可见光影像中绝缘子自动定位方法的提取结果。使用红色对绝缘子检测结果进行标注。对提取绝缘子进行分析,实现绝缘子自爆等缺陷进行判断和报警。通过本文设计的多传感器同步控制方法获得同步定位数据,从而确定故障位置,供人工实地确认。
图9为使用基于运动估计的帧间差分方法【l纠进行红外视频热点检测的结果图。对检测到的红外热点,依据《带电设备红外诊断应用规范(DL/T 664 —2008)》、《交流高压电器在长期工作时的发热 (GB763一1990)》判别允许温升和最高允许温度,实现故障的判蚪川J。本文采用相对温差判断法和表面温度判别法判断设备故障诊断结果,对温度异常点进行标记(图9中绿框标记),并且根据故障诊断结果生成故障诊断结果报表,并提供定位信息,供人工辅助判断。
图10自紫外视频中统计得出的放电光子与光斑分布图。使用光斑聚类方法的方法,对紫外视紫外视频中的高聚集度电子区域进行提取,提取结果见图1l,对密集放电区域进行标识。本文将绝缘子、金具等典型设备的邻近区域内放电区域的光子数量以及放电光斑面积作为是否发生故障的依据。利用同步采集的航拍轨迹、成像时刻姿态参数和线路基础数据库,进行故障位置定位,以供实地核查。
图12为2组红外与可见光多源数据对比分析图。通过本文设计的多传感器同步控制方法,实现了异源数据的同步采集。图12(a)为采集到的红外数据,图12(b)为同步控制采集的可见光数据。进行分析时自低分辨率红外影像探测到发热点,然后自高分辨率可见光影像进一步确定缺陷类型。
利用本文设计的智能诊断系统,对广东佛山 220 kV丹擂甲乙线诊断得出超限地物l处,依据数据提供的定位信息进行现场勘查,确认超限地物为树障;对广东某220 kV线路诊断发现异常发热l 处,异常放电l处,经现场勘查和利用手持红外热像仪、紫外仪检测得到确认。实际运行线路巡检试验表明,本文设计的输电线路无人机巡检系统有效提高了线路数据采集和诊断效率,降低了人工工作量,对线路安全巡检有实用意义。
3结论
1)本文设计研发了一套无人机多传感器电力线路安全巡检及智能诊断系统,使用无人机多传感器平台采集多源异构数据,实现输电线路状态检测和智能诊断。
2)提出了红外、紫外、可见光、激光等多种传感器同步采集控制方法,实现了多源数据统一的时间、空间基准。在此基础上,通过智能诊断系统完成多源巡检数据分析,实现对线路缺陷与隐患的诊断和排查。。
3)巡检试验结果表明,本文研发的无人机安全巡检与智能诊断系统巡检结果与人工实地勘察结果一致,能可靠检测输电线路安全状况,发现多种运行缺陷和安全隐患,为运行单位检修维护提供决策依据。系统还能提供缺陷或隐患位置的可视化场景信息,方便人工辅助诊断和排查,提高输电线路巡检效率。
4)本文研发的无人机安全巡检与智能诊断系统为电力线路巡检维护提供了一种新途径、新方法,可以满足智能电网建设和运维需求。——论文作者:彭向阳1,陈 驰2…,饶章权1,杨必胜2…,麦晓明1,王 柯1
转载请注明来自:http://www.lunwencheng.com/lunwen/dzi/21782.html
