����ժ Ҫ���ϰ������Ǹ�ѹ�����·�������������˵Ĺؼ�����֮һ�����220 kV�����·���������˵Ľṹ�ص㣬�����һ�ֻ�����չ�������˲����ϰ��������Ϣ�ںϼ�ⷽ�������ȸ����ϰ���ֲ��������˳��������˶ഫ�������ϵͳ�Ľṹ���������ϰ�����Ϣ�ں�ϵͳģ�͡�Ȼ������ϰ�����Ϣ״̬ģ�͵ķ������ص㣬�Դ�������ȡ���첽�������ݽ���ͬ����������Ӧ�øĽ�����չ�������˲��Զഫ������Ϣ�����˲����ںϣ����뵥���������Ľ����Ƚϣ�ʵ�����о��������÷�������Ч���ںϲ�ͬ����������Ϣ�����и��ߵIJ�ྫ�Ⱥ���������ٶȡ�
�����ؼ��ʣ�����������;�ϰ�����;��Ϣ�ں�;��չ�������˲�
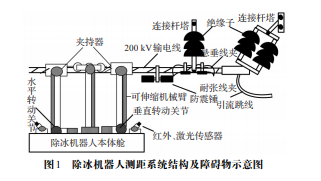
����1 ǰ��
�����ҹ��������·������Ϊ���صĹ���֮һ���������µĵ����¹ʸ���ũҵ���������������������Ӱ�졣2008 ������ĺ����������ѩ�ֺ����ҹ������˾�ľ�����ʧ����·���������ɵ��������������ء�����о������·���߳��������������Ч�ʵ��˹����������ڱ����ҹ������İ�ȫ���к͵������˵�������ȫ���м������е���ʵ���塣
�����ϰ��������Ϣ������������������˵Ĺؼ�����֮һ��Ҳ�DZ��ϳ������������ڳ���ǰ�������а�ȫ������ײ�رܿ����з��������С������еȸ���֧�Ÿ����γɵ���Ҫ�ϰ���ʵ������Խ�ϡ������˵Ķഫ������Ϣ�ںϼ���[1] ���ڽ�������߲�ྫ������ʮ����Ҫ�����á�Ŀǰ���õ������ںϷ���[2] �м�Ȩƽ�������������˲�������Ҷ˹���Ʒ���С���任����D-S֤��������ר��ϵͳ��������ȡ�Ŀǰ�����ڿ������˲��㷨���ϰ�����Ϣ�ںϷ����ڻ����˱���ϵͳ���ѵõ��˽϶�Ӧ�ã�����[3]������һ����������ײϵͳ�Ķഫ�����������˲������ں��㷨��ʵ�����������Ϻͷ���ײ������[4]���ƶ������˵���ϵͳ��������չ�������˲��Ծ���ͷ�����Ϣ�����ںϣ�ʵ���˻����˵ĵ������ϡ��������Ͽ������˲��ںϷ������������ںϾ��Ⱥ�Ч���������롣
��������220 kV�����·�Ľṹ���ϰ���״̬ģ�͵ķ������ص㣬�����һ�����͵Ļ�����չ�������˲��ij����������ϰ�����Ϣ�ںϷ�����ѡ���˺�������ͼ������[5] �����ϰ�����Ϣ���ϵͳ�������ںϾ��ȸߺ������ٶȿ���ŵ㣬����Ч��Ӧ���ڳ��������˵��ϰ�����Ϣ�����������ϡ�Խ�ϡ�
����2 ���������˶ഫ����ϵͳģ��
����2.1 ���������˲��ϵͳ���ϰ���ֲ�
�������������˶ഫ�������ϵͳ�ṹ��220 kV�����·����Ҫ�ϰ���ֲ���ͼ1��
����Ϊ�˱����ڶ��ӱ�ѩ�������ȶ��ɿ���Խ�ϣ������������������Ϊ������ʽ�����۽ṹ������ˮƽ�ʹ�ֱת���ؽڣ����������ͱ��������Ա�֤�����ͷ�������������ж�����Ϳ����䡣
���������˳��õIJ�ഫ�����к������������������������������� CCD �������ȡ����м���������Ӵ�Զ����������ٶȿ졢���ȸߡ�����������ǿ���ŵ㣬�dz��ʺϳ��������˹����ĸ�ѹ�����������ȸ��ӻ�����������������ȸߡ�������ǿ����Ŀ��Ļ���������С���ŵ㣬�ر��Ƿ�λ��Ϣ���ϴ�ʱ�����Ե����ơ���˱�����������������ͼ���������ֱ�װ�ڱ���յ�ǰ������(��ͼ 1)�������·����Ҫ�ϰ���ľ���״̬��Ϣ������ϸĽ�����չ�������˲��ں��㷨��ʵ�ֲ�ͬ�����������ƻ���������ľ��ȡ�
����2.2 �ഫ�����ϰ�����Ϣ�ں�ģ��
������Ƶ���Ϣ�ں�ģ��(��ͼ2)��Ҫ�����ഫ�����ϰ�(���롢�Ƕȵ�)���ݻ�ȡ�����ݹ������������ݼ��ں�(������ȡ�� EKF�ںϼ���)�ͽ������Ȼ��ڡ�
����3 ���������˶ഫ�����ϰ����ģ��
��������[6-7]Ӧ���˶ഫ������Ϣ�ںϵ�����λ�˼�ⷽ����������ϵͳ״̬���̣���ǰ�˵�����������Ϊʾ��������ά����ϵ�����ϵͳģ�ͽṹͼ 3 ��ʾ�����Ǹ��ź��������������LA�ͺ������IR�ֱ������ϰ����б�� RLA �� RIR ����λ�� θLA �� θIR ���߶Ƚ� βLA �� βIR ���첽���ݣ�������ʱ�����ں�ʱ�䲻ͬ����
�����������������ϰ���ij�ʼб���Ϊ R0 ����ʼ���뷽λ�Ǿ�Ϊ θ0 ����ʼ�߶ȽǾ�Ϊ β0 ������ͼ3�ɵò���ϵͳ�ij�ʼ״̬���� So[x0 ��y0 ��z0] ����������ϵ����������ٶ�Ϊ vx �� vy �� vz ���������IJ������ڷֱ�Ϊ TLA �� TIR ����ʼ���ݵ���ʱΪ tLA0 �� tIR0 ������������ǰ���켣����ֱ���˶��� t = T + t0Ϊ��������ʱ�䣬������������������ϰ����ϵͳ״̬�ֱ�Ϊ��
����4.2 �ϰ�����Ϣ�첽���ݵ�ͬ������
����4.2.1 �ں�ʱ���ͬ������
�������ڸ��������IJ������� TLA �� TIR ������ͬ�����ϲ�������������ʱ�����Ծ���ͽǶȲ���ֵ��Ϊ�첽���ݣ��䵽��ʱ�����ں�ʱ�䲻ͬ��������[8]�Դ������첽���ݽ�����ͬ��ʱ������㷨������ͨ���˳���ʱ���ţ��������Եؽ��������ͬ�����ݺ������ںϵ�Ԫ��
����5 �����ں�ʵ�������
����Ϊ��֤���ķ�������Ч�ԣ������ϰ����б���ֵΪ R0LA = R0IR = 12 000 mm ����λ�dz�ֵΪ θ0LA = θ0IR = π/6 ���߶Ƚdz�ֵΪ β0LA = β0IR = π/18 ���������ں���ʱ�ȵȣ�����ʼ�������Ǿ������ʵ����õ�����Ƴ����������������·���Ʊ�����ֱ��ǰ�����ٶ�Ϊ 1 m/ min ���ϰ�����������ں�����趨Ϊ 0.002 5���ϰ��﷽λ�Ǻ߶Ƚ������ں������趨Ϊ0.003��
���������ִ����������˲��ںϵĽ���뵥���������ֱ���˲�����Խ��бȽϣ��ϰ����б����롢��λ�Ǻ߶Ƚǵ��ں϶ԱȽ���ֱ���ͼ4~ͼ6��ʾ��
������ͼ 4 ��֪�������ϰ������ R����չ�������˲��ںϵĽ���ȼ��������������������˲�ʱ���и��ߵľ��Ⱥ��ŵ������ٶȣ����������������㡣ͬ������ͼ 5��ͼ 6��֪���ϰ���ķ�λ�� θ �߶Ƚ� β ���ں�Ҳ����˷dz��õľ��Ⱥ������ٶȣ�����������Ҳ���������㡣
����ʵ�����������ഫ�����ںϷ����������ڵ����������˲��Ĺ��ƽ�����ɱ�֤�ϰ�����Ϣ��ȷ���ơ�Ϊ���������˱��ϡ�Խ�Ϻ�˳�������ṩ����Ч��֧�֡�
����6 ����
��������������·�����������ϰ�����롢��λ�ǡ��߶Ƚǵ���Ϣ�Ķഫ�������ϵͳ���������һ�ַ����ϰ���Ϣ״̬ģ�ͷ������ص�ĸĽ���չ�������˲��ں��·������Կ������˲���״̬�������Э����۲�ģ�;���Ƚ��и��£����������˲����ںϾ��ȣ�����˶ഫ����������Ϣ�����Ź��ơ�ʵ�������������ķ�������Ч���ںϱ����ϰ�����Ϣ�����и��ߵľ��Ⱥ���������ٶȣ��������������˻�����ŵ��ϰ�����Ϣ��——�������ߣ������٣��� 쿣��� ��
�����ο����ף�
����[1] ��Ԫ���������ƣ�������.�ഫ���������ںϼ���(��)[J].���Զ�����2002(4)��4-7.
����[2] ���������Ż��ˣ����.�ഫ���������ںϼ��������о���չ[J].�й������DZ���2008(5)��40-43.
����[3] �����磬�����ѣ���սʤ.���ڶ�����˲���������Ӧ�������ں�[J].ϵͳ��������Ӽ�����2004��26(3)��311-313.
����[4] ���죬����ƽ��л��������.���ڶഫ������Ϣ�ںϵ��ƶ������˵���ϵͳ[J].�����������Ӧ�ã�2005��41(32)��22-25.
����[5] ��壬�̺�.������ MU �뼤��ɨ���ഫ���������ں�[J].�����ˣ�2000��22(6)��470-473.
����[6] ��ϣ�أ������ģ�սǿ.���ڶഫ������Ϣ�ںϵ�����λ�˼�ⷽ��[J].����ѧ����2002��23(5)��483-486.
����[7] Yang Qing-mei��Sun Jian-min.A data fusion method applied in an autonomous robot[C]//Proceedings of the 27th Chinese Control Conference��Kunming��2008��361-364.
����[8] �������������.�����������쳣ʱ��ͬ�����ݹ����㷨[J].�������ӿƼ���ѧѧ������Ȼ��ѧ�棬2008��35(5)��910-915.
����[9] ֣��ǿ�����������鿡.�ֲ�ʽ�״�Ŀ��λ�������ں��㷨[J].�й��״2008(3)��48-52.
����[10] ��Ө��������.������չ�������˲��ij����ںϸ���[J].��·��ͨ�Ƽ���2004(12)��114-117.
����[11] ���գ����ĺ�.�����Ӿ������ͳ��������˶�Ŀ����ٺ�ץȡ[J].����ͨѶ��2002(6)��74-79.
����[12] Chang Hong��Feng Zu-ren.A method of data fusion based on the robust minimum variance filtering[C]//2007 IEEE International Conference on Control and Automation��Guangzhou��2007�� 1760-1764.
����[13] Kim J��Kim Y��Kim S.An accurate localization for mobile robot using extended kalman filter and sensor fusion[C]//2008 International Joint Conference on Neural Networks��2008��2928-2933.
����[14] Canan S��Akkaya R��Ergintav S.Extended Kalman filter sensor fusion and application to mobile robot[C]//Proceedings of the IEEE 12th Signal Processing and Communications Applications Conference��2004��771-774
ת����ע�����ԣ�http://www.lunwencheng.com/lunwen/dzi/21758.html
