摘要:针对果园经济作物种植模式存在的果园行间和株间中耕除草劳动强度大、株间杂草清除困难、需进行人工二次补耕等问题,设计了一种株间自动避障除草装置。研究了避障装置的耕作要求,结合果园株间除草自动避障装置的工作原理,设计了整机的结构,并对液压控制系统进行了理论分析与设计,最终确定了果园株间除草自动避障装置的设计方案。试验结果表明:果园株间自动避障装置在正常作业速度3.5km/h下,碎土率为93.68%,耕作深度为14.64cm,株间漏耕率4.12%,避障通过率为100%,满足了设计要求,提高了果园机械作业效率。
关键词:果园;株间除草;自动避障装置;二次补耕;液压控制系统
0引言
新疆果园的种植模式为密植,葡萄园种植行距为3~3.5m,株距为0.8~1.2m,由于种植行距和株距的限制,很多除草机械无法满足果园清除杂草的要求[1]。
目前,新疆果园常用的除草方法是机械耕除,但除草不彻底,一般株间杂草需进行人工二次耕除,不仅成本较高,而且劳动强度大、工作效率低,严重影响和制约了果园种植业的发展。因此,科学有效地控制草害有利于实现果品的优质和高产,确保果树的健康生长[2]。
近年来,果园除草机械持续发展,其功能和技术不断更新,很大程度上提高了果园全程机械化作业的水平。果园除草机械解决了除草劳动强度大、效率低及人工成本高等问题,避免了杂草与果树争水、争肥、争光等[3];但是,目前果园机械化除草作业存在着株间杂草清除困难、自动化和智能化程度较低等问题。液压系统依靠其独特的技术优势为解决上述问题提供了支撑,采用液压技术也成为了现代农业机械化的典型标志[4]。本文依据新疆果园种植模式研究出了一款与轮式拖拉机配套使用的果园避障除草机,一次作业即可完成疏松行间表层土壤、清除行间杂草、碎化土壤、平整地表等多道工序,同时能清除株间杂草、翻旋株间表层土壤。其避障除草装置能够实现避障作业,同时具有结构简单、控制可靠及工作性能稳定等特点。
1整机结构与工作原理
1.1整机结构
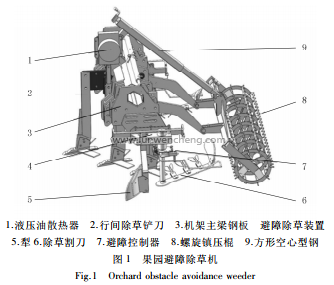
果园避障除草机由机架主梁、行间除草铲刀、液压控制系统、避障除草装置、螺旋镇压辊及液压油散热器等组成,如图1所示[5]。
整机的行间除草铲刀呈人字形排列,分别安装在机架主梁的相应钢板上。针对不同的葡萄行距,通过调节液压系统改变行间除草宽度,达到清除不同行间杂草和翻倒浅层土壤的目的。避障除草装置安装在机架主梁的左右两侧,通过液压控制系统可完成株间杂草清除和株间表层土壤疏松。螺旋镇压辊借助碎土连接板、销和可调节的方形空心型钢与机架主梁相连接,将浅翻后的大块土壤破碎并将杂草掩埋,从而完成整个葡萄行、株间中耕除草过程,达到增加土壤通气性、调节土壤水分及促使葡萄根系生长的目的[6]。
相关知识推荐:农机类文章那个杂志社容易发
1.2避障除草装置工作原理
果园株间除草自动避障装置作业过程中,避障杆没触碰果树时,液压换向阀处于右位,压力油液从左向右流动,在液压系统的作用下除草割刀宽幅作业;避障杆触碰到果树时,避障杆受力弯曲并绕除草割刀轴旋转,在转动过程中触碰液压换向阀使之做出响应,此时液压换向阀处于左位,压力油液在回路中从右向左流动,液压缸随着压力油液的改变进行收缩运动,同时液压系统固定的除草割刀轴使株间除草作业路径发生变化,驱动除草割刀避开果树,以免除草割刀伤及果树。避障作业结束后,避障杆所受的外力消失,避障杆绕除草割刀轴旋转到初始位置,此时液压换向阀处于右位,压力油液自左向右流动,液压缸伸长运动,除草割刀宽幅作业。株间避障除草装置停止作业时,液压换向阀处于中位,液压缸中的液压油液在弹簧力的作用下返回油箱。果园株间避障除草装置劳动强度低、效率高,特别适用于大规模果园株间除草作业,且有利于提高果园全程机械化的发展。避障除草装置具体工作原理如图2所示。
1.3避障除草装置的结构设计
避障除草装置由机架、除草割刀轴、感应避障杆和除草割刀等组成,主要用于清除株间杂草和疏松表层土壤,如图3所示。除草割刀轴一端由液压系统固定并通过轴承支撑,另一端与除草割刀铰接。除草割刀轴与机架之间设有复位扭簧,复位扭簧的两端分别固定在除草割刀轴和机架上,感应避障杆触碰到果树时驱动液压阀换向,变化的液压回路控制液压缸伸缩,从而控制除草割刀轴驱动除草割刀避开果树,保证除草割刀可以快速、高效地完成果园株间的杂草清除作业[7]。
2自动避障装置液压系统的设计
2.1液压系统的工况概述
果园株间自动避障装置在果园中作业时,要求避障杆触碰果树或障碍物时避障杆受力弯曲并绕除草割刀轴旋转;在转动过程中,触碰液压系统的电磁换向阀,并使之做出响应,压力油液在液压阀的控制下自右向左流动,液压缸随着压力油液的改变而进行收缩运动。避障作业结束之后,避障杆所受外力消失,避障杆绕除草割刀轴旋转到最初位置,压力油液自左向右流动,液压缸随着压力油液的改变而进行伸长运动[8]。果园株间自动避障装置作业时,要求液压缸始终处于伸出状态。
2.2液压系统的工作原理
1)株间避障时,避障杆受力弯曲,三位四通电磁换向阀3处于左位,液压回路进油、回油。①进油:压力油液由液压泵至三位四通电磁换向阀,通过平衡阀充满弹簧回程液压缸的右侧,液压缸做收缩运动,此时除草割刀避开果树;②回油:弹簧回程液压缸右侧的压力油液回到油箱。
2)宽幅作业时,避障杆不受力,三位四通电磁换向阀3处于右位,液压回路进油、回油。①进油:压力油液由液压泵至三位四通电磁换向阀,充满弹簧回程液压缸的左侧,液压缸作伸长运动,此时除草割刀宽幅作业;②回油:弹簧回程液压缸右侧的压力油液至平衡阀回到油箱。
3)停止工作时,三位四通电磁换向阀3处于中位。回油:弹簧回程液压缸右侧的压力油液在弹簧力的作用下回到油箱[9]。
液压系统工作原理如图4所示。
2.3虚拟模型的构建与参数设置
根据液压系统的原理图,利用AMESim软件构建果园株间除草自动避障装置液压系统的仿真模型[10],如图5所示。子模型和模型参数如表1、表2所示。
2.4仿真结果及分析
经过软件AMESim求解器运算之后,可以得到液压回路的脉宽调节信号。液压缸右腔流量、速度、位移曲线[11]如图6~图9所示。
由图6可知:液压缸起始为收缩状态,在0~0.32s时间段为株间避障过程;由图7可知:液压缸的平均流量为7.88L/min;由图8可知:液压缸的平均速度为0.45m/s;由图7与图8可知:避障所需时间为0.32s;由图9可知:液压缸的位移在0.32s时达到最大,最大位移为0.15m,0.32~0.66s时间段为株间除草过程。株间除草过程中,液压缸的位移曲线较为平滑,无明显波动,避免了液压缸活塞与底座的碰撞,说明液压缸工作行程的合理性与液压系统虚拟模型建立的正确性。
3试验验证
为了验证果园避障除草机的作业性能,为后续的整机优化提供理论参考,选取新疆石河子地区的512团的葡萄园进行果园除草试验,动力设备选取雷沃M554。田间试验如图10所示。
3.1试验内容
试验内容包括果园株间除草机的碎土率、耕作深度、株间漏耕率、避障通过率和避障系统工作稳定性。耕作性能评定指标如表3所示。
3.1.1碎土率的测定
螺旋镇压辊镇压过后,选定0.5m×0.5m的镇压地表作为碎土率的测定区域,并对测定区域土块的大小进行测量。将测得的土块分为4、4~8、8cm以上3级,将小于4cm的土块质量与测定区域土块总质量之比记为碎土率,每行程测定一点[12]。
2)耕作深度测定。每个样本从地面到地下坚实部位为测量的深度部分,用卷尺测量并同时记录下读数,每次选取15个样本。耕作深度测定如图12所示,测量结果如表5所示。由表4、表5可知:果园作业碎土率为93.68%,平均耕深a=14.65cm,耕深平均标准差S=0.90,变异性平均系数V=6.17%,稳定性平均系数U=90.08%。
3)果园株间漏耕率及避障通过率测量结果如表6和表7所示。由表6、表7可知:果园株间除草自动避障装置耕作时,株间平均漏耕率为4.12%,工况避障通过率100%。这说明,避障除草装置工作性能稳定,符合耕作性能指标。
4结论
根据新疆果园种植模式,一般的果园除草机械无法完成株间杂草清除作业,容易造成少耕、漏耕等问题,需进行人工二次除草,大大增加了劳动强度,降低了劳动效率。为此,研究出了一款与轮式拖拉机配套使用的果园避障除草机,1次作业即可完成疏松行间表层土壤、清除行间杂草、碎化土壤、平整地表等多道工序,同时能清除株间杂草、翻旋株间表层土壤。试验结果表明:果园株间自动避障装置在3.5km/h作业速度下,碎土率为93.68%,耕作深度为14.64cm,株间漏耕率4.12%、避障通过率为100%,符合国家规定标准和设计要求,提高了劳动效率,对新疆果园实现全程机械化作业、提升新疆林果机械技术和林果业的可持续发展水平具有重要意义。
转载请注明来自:http://www.lunwencheng.com/lunwen/nye/15998.html
